В современной лазерной локации используются два основных метода измерения наклонной дальности - импульсный и фазовый. Сразу оговоримся, что в лидарах воздушного базирования в настоящее время используется только импульсный метод, а в наземных лидарах – и импульсный, и фазовый. Причины этого явления мы обсудим позднее, а пока рассмотрим эти два метода измерения дальности подробно.
Рисунок 6. Рост производительности лазерных локаторов импульсного типа
Импульсный метод
Реализация импульсного метода измерения наклонной дальности предполагает определение времени распространения короткого лазерного импульса от источника излучения до объекта и обратно до приемника. С учетом постоянства скорости распространения электромагнитных колебаний в атмосфере![]() , замеренная продолжительность распространения лазерного импульса Ti
позволяет определить наклонную дальность Di
по простой формуле:
, замеренная продолжительность распространения лазерного импульса Ti
позволяет определить наклонную дальность Di
по простой формуле:
На рисунке 7 представлена типовая форма зондирующего лазерного импульса в лидарах типа ALTM канадской компании Optech Inc., а на рисунке 8 показана принципиальная схема приемопередатчика при реализации данной схемы измерения.
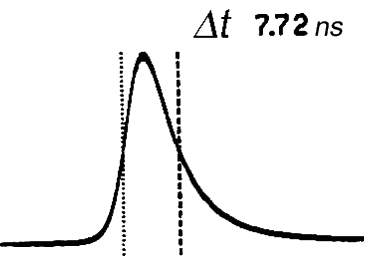
Рисунок 7.
Типовая форма зондирующего импульса при импульсном методе локации
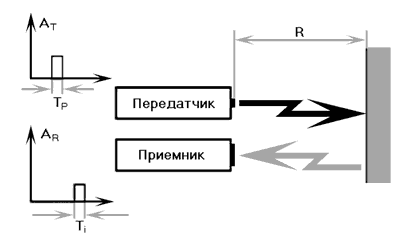
Рисунок 8.
Принципиальная схема приемопередатчика при импульсном методе
Как следует из описания, реализация импульсного метода измерения дальности сравнительно проста в функциональном отношении. Поэтому и аппаратная реализация этого метода не вызывает серьезных проблем, что в качестве положительного следствия имеет достижение устойчивости и достоверности получаемых данных.
Представим некоторые дополнительные соображения, характеризующие импульсный метод:
- По возможности, должна быть обеспечена минимальная длительность зондирующего импульса и его максимальная добротность (т.е. максимально крутой передний фронт). Это требование представляется вполне естественным. Совершенно аналогичные требования к форме зондирующего импульса предъявляются в радиолокации и других технологиях активного зондирования.
- Описанная схема измерений предполагает постоянство скорости и прямолинейно-сть распространения лазерного импульса в атмосфере. Строго говоря, это не совсем так с учетом явления рефракции, которое приводит к искривлению оптического пути импульса. Это явление проявляется тем сильней, чем больше высота съемки. Для последней разработки компании Optech Inc. лидара ALTM 3100 фактическая высота съемки может достигать больших значений – до 4000 м. На таких высотах влияние рефракции для лазерных точек, полученных на краях полосы съемки, уже сопоставимо с точностью метода. Это обстоятельство вынуждает принимать специальные меры для коррекции координат лазерных точек на этапе наземной обработки. Коррекция проводится с использованием аналитических зависимостей, описывающих величину рефракции в зависимости от текущих физических параметров атмосферы, таких как температура и давление на уровне земли.
Сводная таблица 3 содержит концептуальные достоинства и недостатки импульсного метода измерений наклонной дальности.
Таблица 3. Основные достоинства и недостатки импульсного метода измерения дальности
Обсудим важнейшие недостатки импульсного метода измерения дальности.
1. Как и во всех других родственных технологиях, в лазерной локации принято считать, что импульсный метод проигрывает по точности фазовому. Это происходит потому, что фактическая точность каждого измерения зависит от ряда параметров, каждый из которых может оказать на точность конкретного измерения. Таковыми параметрами являются:
- длительность и форма (в частности, крутизна переднего фронта) зондирующего импульса;
- отражательные характеристики объекта;
- оптические свойства атмосферы;
- текстура и ориентация элементарной поверхности объекта вызвавшей отражение зондирующего луча по отношению к линии визирования;
- другие.
Влияние всех перечисленных выше параметров сводится к ослаблению «размыванию» формы отраженного импульса на входе оптической схемы приемника, т.е. к возрастанию неопределенности в измерении длительности задержки распространения зондирующего импульса до объекта и обратно. Повышение этой неопределенности на практике оборачивается снижением точности. Как будет показано ниже, фазовый метод во многом свободен от этого недостатка.
2) Принципиальное ограничение производительности по норме «высота съемки – частота импульсов» состоит в следующем. Из представленной выше функциональной схемы лидара импульсного типа видно, что каждый следующий зондирующий импульс может быть излучен только после того, как зарегистрирован предыдущий отраженный импульс. С учетом конечной скорости распространения электромагнитных колебаний можно определить простое соотношение, которое определяет теоретический предел частоты зондирующих импульсов fmax в зависимости от высоты съемки H , а именно:
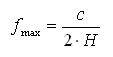
Значения fmax , рассчитанные в соответствии с данной формулой, приведены в таблице 4.
Таблица 4. Максимально возможные значения частоты зондирующих импульсов в зависимости от высоты съемки при импульсном методе
Представленные в таблице 4 значения частот являются теоретически максимально возможными. На практике они несколько меньше.
Отметим также, что данное принципиальное ограничение в той или иной степени относится и ко всем другим методам активного дистанционного зондирования. Здесь оно упомянуто потому, что, как было сказано выше, в авиационной лазерной локации в настоящее время используются исключительно импульсные методы. Поэтому это ограничение существенно на практике, принимая во внимание значительные высоты съемки.
Дальнейшим развитием импульсного метода является так называемый метод регистрации формы отраженной волны (wave form registration) . Практическую реализацию данного метода обеспечивают, например, лидары ALTM 30/70 и ALTM 3100 в качестве опции к базовому импульсному методу измерения.
Технология регистрации формы отраженной волны предполагает запись в цифровом виде полной формы отклика на каждый зондирующий импульс с частотой дискретизации 1 ГГц и выше. Зарегистрированная таким образом волна дает «историю» отражения зондирующего импульса от всех препятствий, встретившихся на его пути (рис. 9).

Рисунок 9. К определению метода регистрации фо-рмы отраженной волны

Рисунок 10.
К определению фазового метода определения наклонной дальности
Наибольший интерес такая информация может представлять для использования в специализированном программном обеспечении обработки лазерно-локационных данных для более достоверного распознавания и геопозиционирования объектов различных классов.
Другим возможным приложением может явиться использование данных такого рода для нормализации изображений распределения интенсивности с учетом высоты полета и угла падения зондирующего луча.
Перейдем к рассмотрению фазового метода .
Рисунок 10 представляет принцип определения наклонной дальности при использовании фазового метода. Этот принцип состоит в определении количества целых длин волн между локатором и объектом и разности фаз излученной и принятой волны модулирующего колебания. Ширина полосы моду-ляции до 10 ГГц при исполь-зовании современных лазерных диодов (semiconductor laser diodes). Отметим, что в этом случае зондирующее излучение должно быть непрерывным, что в общем случае значительно повышает требования по выходной мощности излучающего лазера по сравнению с импульсным методом.
Напомним, что фазовый метод измерения дальности пока применяется то-лько в лидарах наземного базирования.
Главное преимущество фазового метода измерения – более высокая точность, которая может достигать первых миллиметров. Вообще фазовые измерения в оптической и радиодальнометрии (в том числе в GPS и ГЛОНААС методах) считаются самыми точными. Для того чтобы пояснить это положение рассмотрим фазовый метод измерения несколько более подробно.
Для того, чтобы определить расстояние между источником и объектом, необходимо:
Если значения K и удалось определить, то искомое расстояние определяется по формуле:
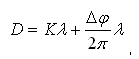
где - длина волны модуляции.
Приведенной простой формулы достаточно, чтобы в принципе дать объяснение высокой точности фазового метода дальномерных измерений. Точность величины определяется стабильностью частоты генератора модулирующего колебания. В современных условиях возможно достичь очень высокой точности этого параметра. Т.е. если значение K определено правильно, то член практически не вносит никакого своего вклада в результирующую ошибку измерения дальности.
Величина также может быть определена достаточно точно. Сразу отметим, что в зависимости от типа лидара может использоваться либо аппаратный метод определения значения с помощью т.н. фазиметров , либо принятый сигнал в цифровой форме записывается на магнитный носитель, а все последующие процедуры анализа фазы осуществляются программно. В любом случае удается достичь высокой точности определения по следующим причинам:
- за счет использования синусоидального закона модуляции ширина спектра входного и выходного сигнала чрезвычайно мала. Теоретически можно говорить о бесконечно узком спектре, т.е. о единственной дискретной частоте -
Важно, что входное и выходное излучение может отличаться по интенсивности (т.е. по амплитуде волны модуляции), но не по частоте . Это обстоятельство обусловливает высокую эффективность и точность корреляционных методов, которые используются при поиске значения
- фазовый метод, в отличие от импульсного, позволяет получить численные значения и оценить достоверность и точность произведенного дальномерного измерения за счет анализа взаимной корреляционной функции излученного и принятого излучения. Достоверное (и как следствие точное) измерение будет характеризоваться наличием отчетливо выраженного максимума взаимной корреляционной функции, а у недостоверного измерения соответствующая функция будет иметь размытый вид и значения максимума будут определяться не столь точно. Наличие возможности численной оценки достоверности измерения позволяет, если необходимо, отвергать некоторые измерения, точность которых находится ниже допустимого порога.
В таблице 5 сведены основные достоинства и недостатки фазового метода измерения дальности.
Упомянутая в таблице в качестве достоинства более высокая производительность, т.е. количество дальномерных измерений в секунду, которая сегодня
Таблица 5. Основные достоинства и недостатки фазового метода измерения дальности
для некоторых моделей наземных лазерных сканеров приближается к 1 ГГц, объясняется следующими двумя обстоятельствами:
- во-первых, по описанным ниже причинам рабочие дальности действия фазовых лидаров невелики, не более 200 м. Поэтому эти приборы по норме "высота (дальность) съемки - частота импульсов" ограничены по частоте импульсов в меньшей степени;
- во-вторых, за счет использования модулирования несущего колебания некоторые из фазовых приборов вообще свободны от этого ограничения. При изменении закона модулирования во времени появляется возможность преодолеть смешение сигналов, отраженных от различных компонентов сцены и пришедших на входной зрачок приемника одновременно. Так как закон моделирования и функция его изменения известны точно, это позволяет надежно детектировать оба сигнала раздельно.
Теперь обсудим недостатки фазового метода измерения. В основном они сводятся к проблеме неоднозначности решения по целым длинам волн и необходимости принятия дополнительных мер по разрешению этой неоднозначности. Действительно, фазовый метод в том виде, как он описан выше, не содержит никаких механизмов определения значения K . Более того, при использовании единственной частоты модуляции определение дальности D при использовании исключительно фазового метода принципиально невозможно. Для разрешения задачи неопределенности по целым длинам волн применяют различные методы, которые, однако, могут быть объединены в две большие группы:
- использование дополнительных источников информации по измеряемой дальности;
- многочастотные методы.
В первом случае необходимо иметь некоторую априорную информацию о значении величины D с точностью не хуже 0.5·. Применительно к лазерно-локационному методу измерения это можно сделать, например, выполнив измерение наклонной дальности импульсным методом, а потом уточнив его фазовым.
Во втором случае используют модуляцию несущей двумя или более синусоидальными колебаниями. Это позволяет однозначно разрешить неопределенность по целым длинам волн в диапазоне от 0 до некоторого максимального значения D max. Если измеряемые дальности превосходят D max, то разрешение однозначности не гарантируется. Как уже было отмечено выше, на практике значение D max пока не превосходит 300 м. Исчерпывающую информацию по применению фазового метода измерения дальности можно получить в источнике (Шануров, 1991).
Чтобы определить расстояние до обнаруженного объекта (цели), необходимо знать время запаздывания отраженного радиоимпульса относительно излученного.
Время запаздывания Δt зависит от расстоянияД до отражающего объекта и скоростис распространения радиоволн. Так как отраженный импульс проходит двойной путь (от радиолокационной станции до объекта и обратно), то это время увеличивается в два раза
Если измерить время запаздывания отраженного импульса, то можно определить расстояние до отражающего объекта. Это расстояние из приведенной выше формулы равно
При запаздывании отраженного импульса относительно излученного на одну микросекунду расстояние до отраженного объекта
Для измерения времени запаздывания отраженного импульса, а, следовательно, и расстояния до обнаруженной цели пользуются электронно-лучевыми трубками. В простейшем случае для этого применяют электронно-лучевую трубку с электростатическим управлением и линейной разверткой луча.
Для измерения дальности в радиолокации наибольшее распространение получил импульсный метод. Измерение дальности основано на постоянстве скорости и прямолинейности распространения радиоволн, которые выдерживаются в реальных условиях с достаточно большой точностью. Измерение дальности сводится к фиксации моментов излучения зондирующего и приема отраженного сигнала и измерению временного интервала между этими моментами.
Для обеспечения данного метода используется импульсная модуляция зондирующего сигнала.

Рис. 3. Принцип импульсной модуляции
а – модулирующие импульсы; б − зондирующие импульсы
Рассмотрим работу простейшей импульсной дальномерной РЛС.
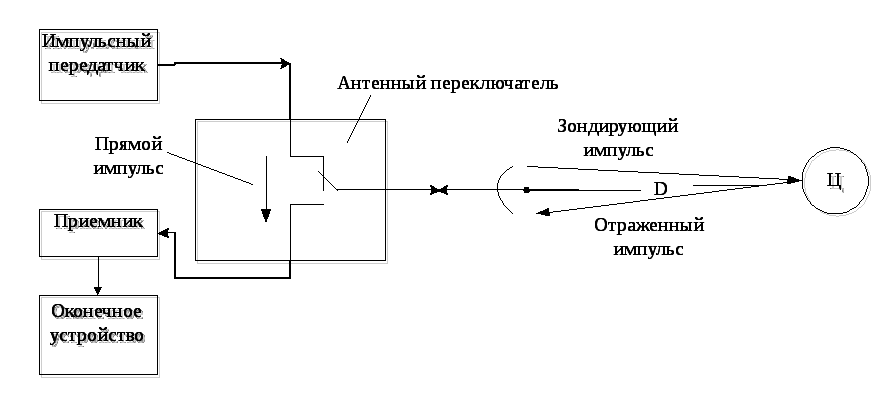
Рис. 4.Структурная схема простейшей импульсной РЛС (дальномера)
В РЛС используется одна антенна как для передачи, так и для приема. Импульсный передатчик вырабатывает радиоимпульс длительностью τ и, который через антенный переключатель (переключатель «прием-передача») попадает в антенну и излучается. Приемник в этот момент отключается на время τ и от антенны и только часть энергии импульса (прямой сигнал) «просачивается» на вход приемника.
Отраженные импульсы, воспринимаемые антенной, через тот же антенный переключатель в паузах между зондирующими импульсами поступают в приемник.
Время запаздывания t з отраженного импульса относительно зондирующего (характеризующего начальный отсчет времени) измеряется с помощью оконечного устройства, например визуального индикатора.
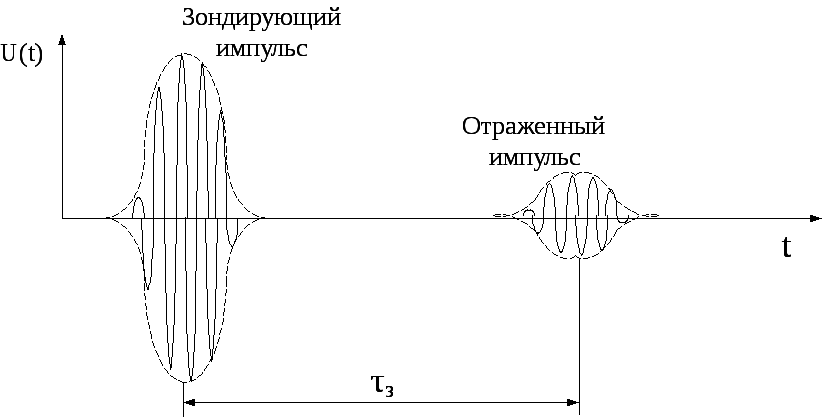
Рис. 5. Временное положение отраженного импульса при отсутствии шумов
Время запаздывания отраженного импульса
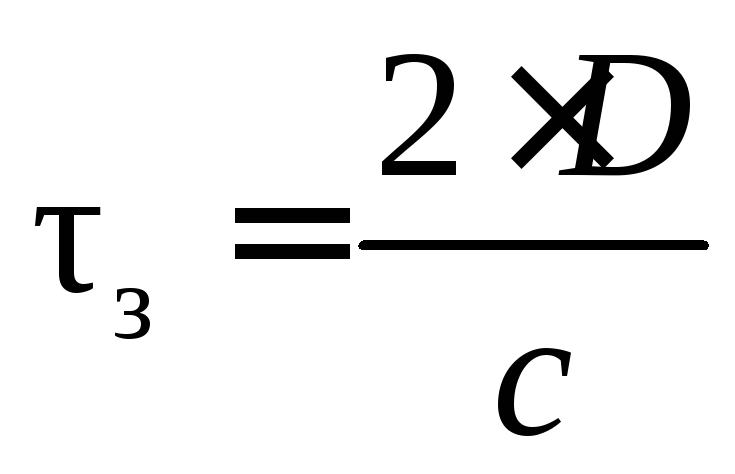 ,
,
где D - расстояние между РЛС и целью;
 - скорость распространения радиоволн.
- скорость распространения радиоволн.
Таким образом, дальность до цели:
 ,
,
для этого достаточно измерить время запаздывания τ з.
Определение дальности наиболее просто осуществляется с помощью электронно-лучевого индикатора с амплитудной отметкой цели. Для этого с помощью горизонтально отклоняющего напряжения пилообразной формы производится периодическая развертка луча электронно-лучевой трубки (ЭЛТ) с постоянной скоростью, т. е. создается линейная шкала времени, которую можно проградуировать в единицах дальности. Такая развертка называется временной или разверткой дальности.

Рис. 6. Измерение времени запаздывания с помощью ЭЛТ
Основываясь на свойствах распространения электромагнитных волн в диапазоне СВЧ (прямолинейность и постоянство скорости, равной скорости света) можно определить параметр, позволяющий оценить дальность. Таким параметром является время запаздывания t з отраженного сигнала относительно излученного. Дальность в этом случае определится следующим образом:
где С – скорость распространения света (С=3·10 8 м/с).
Число 2 в знаменателе учитывает, что электромагнитная волна проходит путь от РЛС до объекта и от объекта до РЛС, т.е. дважды.
При неавтоматическом измерении дальности используется индикатор кругового обзора (рис.3.11). Значение координаты отсчитывается относительно масштабных отметок дальности.
Индикаторы кругового обзора относятся к индикаторам с яркостной отметкой. Обнаруженный сигнал отображается в виде светящейся отметки (с длительным послесвечением). Координаты воздушного объекта определяются по положению отметки относительно масштабных отметок дальности и азимута. Процесс определения дальности сопровождается ошибками измерения, основными из которых являются:
а) ошибки за счет запаздывания сигнала в цепях обработки за счет неточности синхронизации генераторов развертки;
б) ошибки за счет искажения формы развертывающих напряжений;
в) ошибки за счет нестабильностей питающих напряжений;
г) ошибки за счет отсчета.
Ошибки, указанные в пунктах а) и б) относятся к категории систематических и могут быть учтены. Другие две ошибки случайны. Наиболее значительны ошибки отсчета, которые возникают: вследствие неточного определения истинного положения переднего фронта отраженного сигнала на линии развертки; за счет параллакса и интерполяции при конечных размерах апертуры (развертывающего пятна); за счет шумов. Минимальная ошибка измерения дальности в ИКО составляет
где d – диаметр пятна;
m – масштаб развертки дальности.
Для уменьшения ошибок необходимо добиваться наилучшей фокусировки луча и выбирать более крупный масштаб.
Дальность может быть измерена при использовании генератора счетных импульсов, имеющего высокую стабильность частоты повторения (рис.3.12).
Импульс запуска РЛС переводит триггер в состояние, при котором открывается каскад совпадения, через который счетные импульсы поступают на счетчик. Импульс обнаружения переводит триггер в другое состояние, при котором каскад совпадения закрывается. На выходе счетчика фиксируется код, соответствующий количеству импульсов на его входе
где Д – дальность;
с – скорость света;
F п – частота повторения тактовых импульсов.
Показание дальности изменится только тогда, когда число N изменится, по крайней мере, на единицу. В этом случае имеет место дискретность отсчета, равная
Дискретность отсчета обусловливает ошибку измерения дальности, которая равна
![]() .
.
Число разрядов счетчика n определяется максимальной дальностью и допустимой ошибкой измерения
![]() . (3.9)
. (3.9)
Например, при Д макс =200 км и Δ Д =20 м, 2 п =10 4 , откуда n=14.
Устройство, изображенное на рис.3.12, позволяет за один период импульсов запуска измерить дальность только до одного объекта.
Более предпочтительным является метод автоматического измерения дальности, алгоритм которого состоит в следующем. Зона обнаружения РЛС по дальности разбивается на отдельные дискреты (рис. 3.13), величина которых определяется длительностью импульса (минимальный размер) и максимальной ошибкой измерения дальности (максимальный размер).
Период следования импульсов запуска (ИЗ) определяет максимальную дальность обнаружения воздушных объектов. Устройство измерения дальности должно быть многоканальным, т.к. за один период зондирования необходимо обеспечить измерения дальностей до нескольких объектов, имеющих одинаковую азимутальную координату.
При автоматическом измерении дальность определяется по номеру дискрета N Д, в котором наблюдается отметка
где h Д – длительность одного дискрета дальности.
Номер дискрета может быть установлен путем счета тактовых импульсов, которыми дискретизируется дальность за время периода повторения Т п импульсов запуска. Устройство измерения дальности может быть выполнено в соответствии со структурой, изображенной на рис. 3.14.
Работает устройство следующим образом. Импульс запуска РЛС «обнуляет» счетчик. С поступлением тактовых импульсов ТИ на выходе счетчика формируется текущий код дальности, который выдается на одни из входов схем совпадения «И». В ответном сигнале ответчика формируется координатный код, представляющий собой время – импульсный код, состоящий из двух импульсов. Дешифрация координатного кода реализуется линией задержки и схемой совпадения «И». В результате дешифрации на выходе схемы совпадения появляется импульс, разрешающий выдачу кода дальности на выходы схемы совпадения «И». Следующий цикл работы начинается с «обнуления» счетчика. Число разрядов цифрового кода дальности зависит от общего числа дискретов дальности. При измерении дальности в первичных РЛС разрешение на выдачу текущего кода дальности на выход измерителя дает импульс с генератора импульсов считывания (ГИС), формируемой с приходом импульса обнаружения (ИО).
Измерение азимута
Применяется метод максимума при измерении угловых координат.
Метод максимума относится к амплитудным методам измерения угловых координат, которые основаны на использовании направленных свойств антенн. Пеленгация методом максимума (рис. 3.15) осуществляется путем совмещения направления максимума пеленгационной характеристики (или диаграммы направленности антенны) β с направлением на пеленгуемый объект β 0 в результате плавного вращения антенны. Пеленг (азимут) отсчитывается в тот момент, когда напряжение на выходе приемника становится максимальным.
Практическая реализация метода максимума может быть осуществлена следующим образом.
В случае неавтоматического определения азимута, координата отсчитывается по середине обнаруженной отметки (отсчет в азимутальной плоскости) относительно масштабных отметок азимута. Основными достоинствами метода максимума являются: простота определения угловых координат, а также то, что в момент точного пеленга имеет место наибольшее отношение сигнал-шум, так как отсчет производится по максимуму сигнала.
Одним из основных недостатков метода является низкая точность, обусловленная малой остротой вершины сигнала. В РЛС с достаточно узкими диаграммами направленности антенн ошибка измерения азимута составляет
где – ширина диаграммы направленности по уровню половинной мощности (рис. 3.16).

Для уменьшения ошибок измерения азимута необходимо применять меры, позволяющие сделать луч более узким (например, увеличивать линейный размер антенны).
При автоматических методах измерения координат зона, в пределах которой обеспечивается прием и обнаружение сигналов, разбивается на элементы по дальности и азимуту. Величина дискрет по дальности и азимуту выбирается из допустимых ошибок измерения координат.
Число дискрет по азимуту в системах радиолокации выбрана 4096, что обеспечивает ошибку при измерении азимута 5 угловых минут. Это удовлетворяет требованиям по точностным характеристикам.
Диаграмма направленности антенны в горизонтальной плоскости симметрична, поэтому азимут объекта может быть определен следующим образом:
![]() , (3.10)
, (3.10)
где β н – азимут начала пачки;
β к – азимут конца пачки
Δβ – систематическая ошибка, обусловленная смещением β н и β к при проверке критериев обнаружения начала и конца пачки.
Структура измерителя азимута изображена на рис. 3.17.
Работа схемы заключается в следующем. С приходом импульса «Север» счетчик «обнуляется». При поступлении масштабных азимутальных импульсов (МАИ), на выходе счетчика формируется цифровой код, представляющий собой текущий код азимута. Этот код поступает на одни из входов схем совпадения «И», на вторые входы которых подаются импульсы считывания с генератора импульсов считывания (ГИС). При наличии импульсов считывания на выходы схем совпадения выдаются цифровые коды β н и β к, которые поступают в спецвычислитель, где определяется азимут воздушного судна.
Формирование импульсов начала и конца пачки отраженного сигнала осуществляется следующим образом. Для ослабления влияния ложных импульсов и пропусков сигнала на точность измерения начало и конец пачки определяются по специальному критерию (логике). В качестве критерия может быть выбран следующий. Если за три последовательных периода повторения обнаружен один импульс, он считается ложным (рис. 3.18), если два – они считаются началом пачки. Конец пачки отмечается, если в трех последовательных периодах после начала впервые обнаружен пропуск двух импульсов (пропуск только одного импульса считается ложным).
В общем случае может использоваться логика «k из т». Логики могут быть целыми (k = т) и дробными (k < m). Для определения начала и конца пачки могут использоваться одинаковые логики либо различные. При использовании различных логик менее жесткая определяет конец пачки, чтобы исключить ее дробление вследствие флюктуационного выпадения отдельных импульсов. Например, если начало пачки определяется по логике «3 из 3» (3/3), тогда конец пачки будет определяться по логике «2 из 3» (2/3). В некоторых случаях конец пачки определяется тогда, когда в смежных периодах повторения импульсы отсутствуют l раз (l нулей подряд). Такую логику обозначим как «k/m – l».
Структурная схема формирователя импульсов начала и конца пачки изображена на рис. 3.19.
Генератор стандартных импульсов срабатывает, когда импульсы с выхода приемника превысят некоторый порог. В дальнейшем осуществляется проверка критериев обнаружения импульсов начала и конца пачки и формирование этих импульсов. На рис. 3.20, 3.21. изображены обнаружители импульсов начала и конца пачки.
![]()
Приведенные обнаружители осуществляют анализ по критерию «2 из 3». Поступающие на вход импульсы задерживаются на один и два периода повторения, суммируются и подаются на пороговое устройство, которое срабатывает при суммировании не менее двух импульсов. Формирование импульсов начала и конца пачки реализуется схемой, состоящей из линии задержки и каскада несовпадения, пропускающего сигналы, если они одновременно отсутствуют на двух входах.
На рис. 3.22 изображены эпюры напряжений, поясняющие процесс формирования импульсов начала и конца пачки.
Следует подчеркнуть, что в процессе проверки критериев обнаружения импульсов начала и конца пачки, происходит сдвиг этих импульсов относительно действительного положения импульсов пачки. Это является систематической ошибкой, которая должна быть учтена в вычислителе азимута
где Δβ – поправка, учитывающая время проверки критериев обнаружения.
При использовании критерия «k/m – l» начало пачки β н оказывается смещенным вправо на (т – 1) позиций, а конец пачки β к – на l позиций. В этом случае систематическая поправка Δβ равна
где – угловой дискрет (угол между соседними азимутальными позициями).
Рассмотренные схемы обработки являются однопороговыми.
МЕТОДЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ
Для измерения дальности до отражающих объектов используют три метода: импульсный, частотный и фазовый. В основе всех трех методов лежат явления, обусловленные конечной скоростью распространения радиоволн в пространстве. Вследствие ряда преимуществ наибольшее распространение в радиолокации получил импульсный метод измерения дальности.
ИМПУЛЬСНЫЙ МЕТОД ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ
Определение дальности в импульсных дальномерах сводится к измерению времени запаздывания отраженного от цели импульса относительно зондирующего, так как
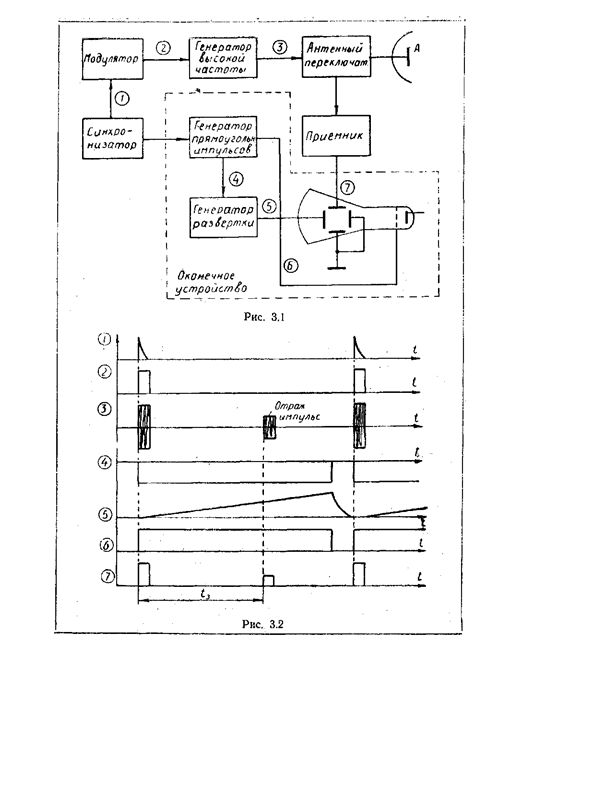
Это основное соотношение для радиодальнометрии. Запаздыванию t 3 = 1 мксек соответствует дальность R=150м. Чтобы получить высокую точность определения R, нужно точно измерять t з. Структура импульсного дальномера представлена на рис. 3.1, а соответствующие ей временные диаграммы - на рис. 3.2.
Отраженные сигналы в простейшем случае, когда целью является одиночный объект малых размеров, представляют собой высокочастотные импульсы весьма малой интенсивности приблизительно той же длительности, что и излучаемые импульсы.
Импульсный радиолокатор состоит из синхронизатора, передатчика, приемника и оконечного устройства.
Оконечное устройство является весьма важным элементом РЛС. В оконечное устройство, в общем случае, входит также система измерения угловых координат, связанная с антенной синхронной передачей угла поворота антенны. Оконечное устройство должно решать две задачи: во-первых, выделять сигнал на фоне помех с сохранением всех полезных параметров и, во-вторых, по параметрам выделенного сигнала измерять координаты цели и характеристики ее движения. В зависимости от получателя радиолокационной информации могут быть использованы различные типы оконечных устройств.
Если получателем радиолокационной информации является оператор, то оконечным устройством современной РЛС, как правило, служит электронно-лучевой индикатор или жидкокристаллический дисплей. Здесь радиолокационные сигналы преобразуются в видимое на экране изображение.
Если получателем радиолокационной информации является, вычислительное устройство или непосредственно исполнительный механизм непрерывного действия, то оконечным устройством РЛС должна быть система автоматического сопровождения цели. Последняя выдает данные о дальности цели обычно в виде напряжения, а данные об угловых координатах - в виде углов поворота осей антенны.
Если информация с РЛС поступает на ЦВМ, ее необходимо подавать в виде чисел двоичного кода. Оконечное устройство, обеспечивающее преобразование радиолокационной информации в двоичный код, получило название устройства инструментального съема данных.
Рассмотрим работу импульсного дальномера, в качестве оконечного устройства которого используется электроннолучевой индикатор. Синхронизатор вырабатывает управляющие импульсы, следующие с определенной частотой повторения, с помощью которых координируется во времени работа всех элементов РЛС. Импульсы синхронизатора запускают передатчик, который состоит из модулятора и высокочастотного генератора. На выходе передатчика вырабатываются импульсы высокочастотных колебаний, которые через антенный переключатель АП поступают в антенну и излучаются.
Большинство импульсных РЛС для излучения и приема сигналов используют одну и ту же антенну, которая во время излучения подключается к передатчику и отключается от приемника, а во время приема сигналов подключается к приемнику и отключается от передатчика. Переключение антенны осуществляется АП, действие которого основано на использовании отрезков четвертьволновых линий и газовых разрядников.
Отраженные от цели сигналы через антенну и АП поступают в приемник, где усиливаются до необходимой величины и преобразуются в видеоимпульсы. Так как АП не может осуществить идеального отключения приемника, на его вход просачиваются значительно ослабленные зондирующие импульсы передатчика. По амплитуде они значительно превышают отраженные импульсы. В РЛС находят применение два вида индикаторов: индикаторы с амплитудной отметкой и индикаторы с яркостной отметкой.
Рассмотрим индикатор с амплитудной отметкой. Для создания развертки по дальности на горизонтально отклоняющие пластины ЭЛТ подается напряжение от генератора развертки, который запускается импульсом синхронизатора одновременно с передатчиком. Если напряжение развертки линейно, то светящееся пятно на индикаторе перемещается от одного края экрана трубки к другому с постоянной скоростью v р. Импульсы с выхода приемника, поступающие на вертикально отклоняющие пластины индикатора, вызывают отклонение пятна по вертикали. Первый выброс на экране создается просачивающимся через АП импульсом передатчика, все остальные выбросы - сигналами, отраженными от объектов (рис. 3.3). Так как величина перемещения пятна по экрану является мерой времени, то расстояние l между передним фронтом импульса передатчика и передним фронтом отраженного сигнала характеризует дальность до объекта. Действительно,
l = v p t з = v p 2R/c =MR, (1)
где v р - скорость движения пятна по экрану трубки (скорость развертки);
t з = 2R/c - время задержки отраженного сигнала относительно зондирующего;
M= 2v p R/c - масштаб линейной развертки.
Отсчет дальности в простейшем случае производится либо по механической шкале, наложенной на экран трубки, либо по электронной шкале, созданной в плоскости временной развертки. Основное достоинство метода отсчета по механической шкале заключается в его простоте. Недостатком его является малая точность отсчета. Применяется в станциях дальнего обнаружения и в других устройствах, где не требуется высокая точность.
Применение частотной модуляции (ЧМ) излучаемого сигнала позволяет создать дальномер с непрерывным излучением, обладающий высокой точностью и разрешающей способностью при измерении дальности. При этом сохраняется возможность измерения скорости движения объекта доплеровским методом.
Определение дальности частотным методом сводится к измерению изменения частоты излучаемых колебаний за время распространения сигнала до отражающего объекта и обратно. Если частота излучаемых колебаний изменяется непрерывно по линейному закону со скоростью , то приращение частоты излучаемых колебаний за время распространения сигнала составит . Измеряя разность частот излучаемых и принимаемых колебаний , определим дальность объекта:
![]()
Однако непрерывное изменение частоты по линейному закону практически неосуществимо и приходится применять Периодическую модуляцию частоты, что изменяет работу системы. Практически используют три вида модуляции: симметричную линейную (СЛЧМ), несимметричную линейную (НЛЧМ) и гармоническую (синусоидальную) (ГЧМ).
Рассмотрим работу частотного дальномера при использовании симметричной линейной модуляции. Структурная схема простейшего частотного дальномера представлена на рис. 16.1, а.
Работу дальномера при неизменном расстоянии до объекта поясняет временная диаграмма на рис. 16.1,б. Верхний график характеризует изменение частоты излучаемых (сплошная линия) и принимаемых (пунктирная линия) колебаний, имеющих среднюю частоту , период модуляции и девиацию частоты . Нижний график воспроизводит изменение разностной частоты биений . При выполнении условия можно записать:
Выражение для не учитывает провалы кривой при . Фактически частотомер фиксирует среднюю частоту биений за период модуляции:
При выполнении условия . Следовательно,

Обычно в частотных системах измерения дальности одного объекта в качестве частотомера используют счетчик импульсов, который фиксирует число биений за период модуляции:
![]()
Дискретность отсчета , соответствующая изменению числа биений на единицу, может быть найдена из соотношения
![]()
![]()
где - модуляционная длина волны.
Одним из очевидных путей уменьшения постоянной погрешности является увеличение девиации частоты. Однако из-за ряда причин возможности увеличения ограничены, поэтому при необходимости устранения или радикального уменьшения постоянной погрешности применяют усложненные системы, например системы с двойной частотной модуляцией. Приведенное объяснение постоянной погрешности ЧМ системы измерения дальности наглядно, но из него можно сделать неправильный вывод, что ее причина в дискретности счетчика. На самом же деле причина появления ошибки заключается в дискретности спектра периодического сигнала, используемого в ЧМ-дальномерах. Спектр биений также дискретный со спектральными линиями, расположенными на шкале частот в точках . При измерении и будет зафиксирована частота, то разрешаемое им расстояние
![]()
Это расстояние и характеризует разрешающую способность ЧМ-дальномера по дальности.
Таким образом, точность и разрешающая способность ЧМ-дальномера, а также минимальная дальность определяются девиацией частоты излучаемого сигнала, т. е. шириной его спектра.