·о ·р
Широтно-импульсная модуляция (ШИМ, англ. Pulse-width modulation (PWM) ) - приближение желаемого сигнала (многоуровневого или непрерывного) к действительным бинарным сигналам (с двумя уровнями - вкл /выкл ), так, что, в среднем, за некоторый отрезок времени, их значения равны. Формально, это можно записать так:
,где x (t ) - желаемый входной сигнал в пределе от t1 до t2 , а ∆T i - продолжительность i -го ШИМ импульса, каждого с амплитудой A . ∆T i подбирается таким образом, что суммарные площади (энергии) обеих величин приблизительно равны за достаточно продолжительный промежуток времени, равны так же и средние значения величин за период:
 .
.
Управляемыми "уровнями", как правило, являются параметры питания силовой установки, например, напряжение импульсных преобразователей /регуляторов постоянного напряжения/или скорость электродвигателя. Для импульсных источников x (t ) = U const стабилизации.
ШИП - широтно-импульсный преобразователь, генерирующий ШИМ-сигнал по заданному значению управляющего напряжения. Основное достоинство ШИМ - высокий КПД его усилителей мощности, который достигается за счёт использования их исключительно в ключевом режиме. Это значительно уменьшает выделение мощности на силовом преобразователе (СП).
Применение
При широтно-импульсной модуляции в качестве несущего колебания используется периодическая последовательность прямоугольных импульсов, а информационным параметром, связанным с дискретным модулирующим сигналом, является длительность этих импульсов. Периодическая последовательность прямоугольных импульсов одинаковой длительности имеет постоянную составляющую, обратно пропорциональную скважности импульсов, то есть прямо пропорциональную их длительности. Пропустив импульсы через ФНЧ с частотой среза , значительно меньшей, чем частота следования импульсов, эту постоянную составляющую можно легко выделить, получив постоянное напряжение. Если длительность импульсов будет различной, ФНЧ выделит медленно меняющееся напряжение, отслеживающее закон изменения длительности импульсов. Таким образом, с помощью ШИМ можно создать несложный ЦАП : значения отсчётов сигнала кодируются длительностью импульсов, а ФНЧ преобразует импульсную последовательность в плавно меняющийся сигнал.
· ЛЧМ · ФМ (PM) · СКМ АМн · ФМн · КАМ · ЧМн · GMSKOFDM · COFDM · TCM АИМ · ДМ · ИКМ · ΣΔ · ШИМ · ЧИМ · ФИМ FHSS · DSSS · CSS
График, иллюстрирующий применение трёхуровневой ШИМ для управления электродвигателем, которая используется в приводах асинхронных электродвигателей с переменной частотой. Напряжение от ШИ-модулятора, подаваемое на обмотку машины изображено синим (V). Магнитный поток в статоре машины показан красным (B). Здесь магнитный поток имеет приблизительно синусоидальную форму, благодаря соответствующему закону ШИМ.
Широтно-импульсная модуляция (ШИМ, англ. pulse-width modulation (PWM) ) - процесс управления мощностью, подводимой к нагрузке, путём изменения скважности импульсов, при постоянной частоте. Различают аналоговую ШИМ и цифровую ШИМ , двоичную (двухуровневую) ШИМ и троичную (трёхуровневую) ШИМ .
Причины распространения ШИМ
Основной причиной применения ШИМ является стремление к повышению КПД при построении электронной аппаратуры и в других узлах, например, ШИМ используется для регулировки яркости подсветки LCD-мониторов и дисплеев в телефонах, КПК и т.п..
Тепловая мощность, выделяемая на ключе при ШИМ
В ШИМ в качестве ключевых элементов использует транзисторы (могут быть применены и др. полупроводниковые приборы) не в линейном, а в ключевом режиме, то есть транзистор всё время или разомкнут (выключен), или замкнут (находится в состоянии насыщения). В первом случае транзистор имеет почти бесконечное сопротивление, поэтому ток в цепи весьма мал, и, хотя всё напряжение питания падает на транзисторе, выделяемая на транзисторе мощность практически равна нулю. Во втором случае сопротивление транзистора крайне мало, и, следовательно, падение напряжения на нём близко к нулю - выделяемая мощность также мала. В переходных состояниях (переход ключа из проводящего состояния в непроводящее и обратно) мощность, выделяемая в ключе, значительна, но так как длительность переходных состояний крайне мала, по отношению к периоду модуляции, то средняя мощность потерь на переключение оказывается незначительной.
1. R t r → ∞ ↔ P = U 2 R → 0 {\displaystyle R_{tr}\rightarrow \infty \leftrightarrow P={{\frac {{U}^{2}}{R}}\rightarrow 0}}
2. R t r → 0 ↔ P = I 2 R → 0 {\displaystyle R_{tr}\rightarrow 0\leftrightarrow P={I}^{2}R\rightarrow 0}
Принцип работы ШИМ
Аналоговая ШИМ
Аналоговая ШИМ реализуется с помощью компаратора , на один вход которого подаются треугольный или пилообразный периодический сигнал со вспомогательного генератора, а на другой - модулирующий сигнал. На выходе компаратора образуются периодические прямоугольные импульсы с переменной шириной, скважность которых изменяется по закону модулирующего сигнала, а частота равна частоте треугольного или пилообразного сигнала и обычно постоянна.
Аналоговая ШИМ применяется в усилителях низкой частоты класса «D ».
Цифровая ШИМ
В двоичной цифровой технике, выходы в которой могут принимать только одно из двух значений, приближение желаемого среднего уровня выхода при помощи ШИМ является совершенно естественным. Схема настолько же проста: пилообразный сигнал генерируется N -битным счётчиком. Цифровые устройства (ЦШИП) работают на фиксированной частоте, обычно намного превышающей реакцию управляемых установок (передискретизация ). В периоды между фронтами тактовых импульсов выход ЦШИП остаётся стабильным, на нём действует либо низкий уровень, либо высокий, в зависимости от выхода цифрового компаратора, сравнивающего значение счётчика с уровнем приближаемого цифрового сигнала V (n ). Выход за много тактов можно трактовать как череду импульсов с двумя возможными значениями 0 и 1, сменяющими друг друга каждый такт Т . Частота появления единичных импульсов получается пропорциональной уровню приближаемого сигнала ~V (n ). Единицы, следующие одна за другой, формируют контур одного, более широкого импульса. Длительности полученных импульсов переменной ширины ~V (n ) кратны периоду тактирования T , а частота равна 1/(T *2 N ). Низкая частота означает длительные, относительно T , периоды постоянства сигнала одного уровня, что даёт невысокую равномерность распределения импульсов.
Описанная цифровая схема генерации подпадает под определение однобитной (двухуровневой) импульсно-кодовой модуляции (ИКМ ). 1-битную ИКМ можно рассматривать в терминах ШИМ как серию импульсов частотой 1/T и шириной 0 либо T . Добиться усреднения за менее короткий промежуток времени позволяет имеющаяся передискретизация. Высоким качеством обладает такая разновидность однобитной ИКМ, как импульсно-плотностная модуляция (pulse density modulation ), которая ещё именуется импульсно-частотной модуляцией .
Восстанавливается непрерывный аналоговый сигнал арифметическим усреднением импульсов за много периодов при помощи простейшего фильтра низких частот. Хотя обычно даже этого не требуется, так как электромеханические составляющие привода обладают индуктивностью, а объект управления (ОУ) - инерцией, импульсы с выхода ШИМ сглаживаются и ОУ, при достаточной частоте ШИМ-сигнала, ведёт себя как при управлении обычным аналоговым сигналом.
В цифровой ШИМ период делится на части, которые заполняются прямоугольными подымпульсами. Средняя величина за период зависит от количества прямоугольных подымпульсов. Цифровая ШИМ - приближение бинарного сигнала (с двумя уровнями - вкл /выкл ) к многоуровневому или непрерывному сигналу так, чтобы их средние значения за период времени t 2 -t 1 были бы приблизительно равны.
Формально это можно записать так:
∫ t 1 t 2 x (t) d t t 2 − t 1 = ∑ i = 1 n A ∗ 4 T i t 2 − t 1 , {\displaystyle {\int _{t1}^{t2}{x(t)\,dt} \over {t2-t1}}={\sum _{i=1}^{n}{A*{\mathcal {4}}T_{i}} \over {t2-t1}},}где x (t ) - входной сигнал в пределах от t 1 до t 2 , а ∆T i = t 2 − t 1 n {\displaystyle {\frac {t2-t1}{n}}} - продолжительность i -го ШИМ подымпульса, каждого с амплитудой A . n выбирается таким образом, чтобы за период разность суммарных площадей (энергий) обеих величин была меньше допустимой:
∫ t 1 t 2 x (t) d t − ∑ i = 1 n A ∗ 4 T i < E {\displaystyle \int _{t1}^{t2}{x(t)\,dt}-\sum _{i=1}^{n}{A*{\mathcal {4}}T_{i}}Управляемыми «уровнями», как правило, являются параметры питания силовой установки, например, напряжение импульсных преобразователей /регуляторов постоянного напряжения/ или скорость электродвигателя. Для импульсных источников x Ссылки
Широтно-импульсная модуляция состоит в изменении ширины (длительности) импульсов, следующих друг за другом с постоянной частотой. Широтно-импульсная модуляция (ШИМ, англ. Pulse-width modulation (PWM)) - приближение желаемого сигнала (многоуровневого или непрерывного) действительным бинарным (с двумя уровнями - вкл/выкл), так что в среднем, за отрезок времени, их значения равны. Основным регулирующим фактором выступает относительная длительность импульсов или коэффициент заполнения
,где Т – период следования импульсов. При односторонней ШИМ, опорное напряжение представляет собой периодические пилообразные колебания. В этом случае модуляция осуществляется изменением положения только одного фронта импульса. Для двусторонней ШИМ, требуется треугольное (желательно равностороннее) опорное напряжение. Двусторонняя ШИМ, обладает более высоким быстродействием, чем односторонняя, поэтому ее применяют чаще. Если входной сигнал – биполярный, то должны меняться полярность и среднее значение выходного напряжения. При этом возможны два типа модуляции разнополярная ШИМ и однополярная ШИМ.
1. Формулировка задания
В данной курсовой работе разрабатывается широтно-импульсный модулятор со следующими параметрами:
Таблица 1. Содержание задания
2. Разработка функциональной схемы устройства
Рассмотрим функциональную схему и принцип работы устройства.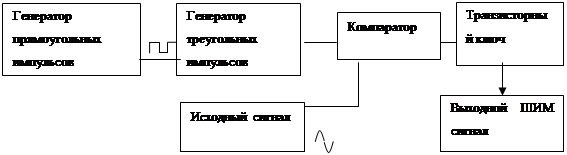 |
Рисунок 1 – Функциональная схема
Генератор прямоугольных импульсов необходим для образования импульсов на следующем блоке – ГЛИНе.
Исходя из задания, определяем, что в качестве опорного напряжения должны быть «треугольники». На выходе ГЛИНа имеем треугольные импульсы, которые являются тем самым опорным напряжением, подаваемым на компаратор.
Компаратор устройство, на отрицательный вход которого подаётся опорный сигнал в виде треугольников, а на положительный − модулируемый непрерывный аналоговый сигнал.
По заданию, модулируемым сигналом является синусоида с частотой 200Гц.
Так же согласно заданию, амплитуда выходных сигналов, должна быть 10В. Нужную амплитуду обеспечивает электронный ключ.
3. Функциональные блоки
3.1 Генератор прямоугольных импульсов
Кварцевый генератор - генератор колебаний, синтезируемых кварцевым резонатором, входящим в состав генератора. Обычно обладает небольшой выходной мощностью.
Внешнее напряжение на кварцевой пластинке вызывает её деформацию. А она, в свою очередь, приводит к появлению зарядов на поверхности кварца (пьезоэлектрический эффект). В результате этого механические колебания кварцевой пластины сопровождаются синхронными с ними колебаниями электрического заряда на её поверхности и наоборот.
Для обеспечения связи резонатора с остальными элементами схемы непосредственно на кварц наносятся электроды, либо кварцевая пластинка помещается между обкладками конденсатора.
Используем Генератор Пирса. В схеме используется минимум компонентов: один цифровой инвертор, один резистор, два конденсатора и кристалл кварца, который действует как высокоизбирательный элемент фильтра.
Генератор с RC частотно-задающей цепью, принцип его работы основан на процессе зарядки-разрядки конденсатора С через резистор R. Через этот резистор осуществляется ООС по постоянному току, а через конденсатор-ПОС по переменному.
Второй инвертор в схеме генератора предназначен для уменьшения длительности фронтов формируемого прямоугольного колебания. Это необходимо для уменьшения влияния последующей схемы на стабильность колебаний задающего генератора, а также для более надёжной работы цифровых счётчиков делителя частоты.
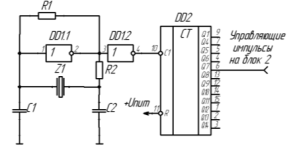
Рисунок 2 – Блок 1. Генератор прямоугольных напряжений
Схема делителя частоты до значения нужной частоты. Для реализации делителя потребуется микросхема 561ИЕ16.
3.2 Генератор линейно изменяющегося напряжения
Этот блок представляет собой генератор треугольного напряжения. В настоящее время генераторы с малым коэффициентом нелинейности (ε<0,0) и слабым влиянием нагрузки на форму выходного напряжения создаются с использованием операционных усилителей.
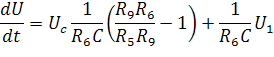
В частности, распространены генераторы на основе интегратора, управляемого входным импульсом напряжения прямоугольной формы. Элементами схемы являются источник питания, зарядный резистор R 6 , конденсатор С3 и разрядный транзистор VT1. Выходное напряжение генератора представляет собой, усиленное операционным усилителем, напряжение на конденсаторе. ОУ охвачен отрицательной (R 5 и R 9) и положительной (резистор R 10) обратными связями.
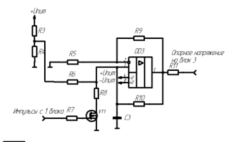
Рисунок 3 – ГЛИН
Генератор работает следующим образом. В момент, когда полевой транзистор VT1 закрыт, происходит заряд конденсатора С3 через резисторы R10 и R7. Как только мы подаем импульс на VT1, происходит разряд конденсатора этот полевой транзистор.
3.3 Компаратор
Данный блок представляет собой компаратор, суть работы которого заключается в сравнении двух входящих сигналов, и получении на выходе импульсов различной длительности. На отрицательный вход подаётся опорный сигнал, т.е. «треугольные импульсы», а на положительный - сам модулируемый непрерывный аналоговый сигнал. Частота импульсов соответствует частоте треугольных импульсов. Ту часть периода, которую входной сигнал выше опорного, на выходе получается единица, ниже - нуль.
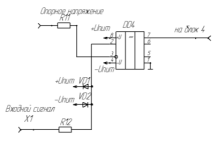
Рисунок 4 - Компаратор
3.4 Электронный ключ
Для получения на выходе импульсов нужной амплитуды используем транзистор VT2 и элемент «И-НЕ» DD5. Резистор R13 ограничивает ток на вход базы транзистора. Резистор R15 является нагрузкой.

Рисунок 5 – Схема электронного ключа
4. Расчётная часть и выбор элементов схемы
4.1 Расчет генератора импульсов
На рисунке 6 показан генератор, со стоящий из активного элемента – инвертора – и пассивного элемента – кварцевого резонатора.
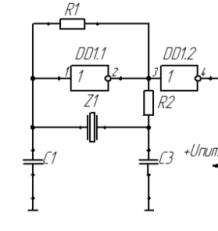
Рисунок 6 – Кварцевый генератор
Вместо одного инвертора можно поставить любое нечетное количество инверторов.
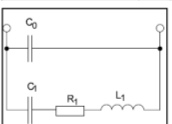
Рисунок 7 – Эквивалентная схема замещения
Эквивалентная схема кварцевого резонатора показана на рисунке 7.
Генератор Пирса – одна из наиболее популярных схем. Она является основой практически всех генераторов на одном вентиле. Кварц ведет себя как большая индуктивность, так как он подключен параллельно. Роль нагрузки на выход резонатора играют конденсаторы C1 и C2. Конденсаторы C1 и C2 играют роль нагрузочной емкости кварцевого резонатора.
В качестве резонатора выбираем кварцевый резонатор: KX-49 номинальная частота которого - 2.4576 МГц. В таблице 2 приведены параметры кварцевого резонатора.
Таблица 2 Параметры KX-49
| С L | R 1 | C 0 | F |
| 30пФ | 200 Ом | 7пФ | 2,4576 МГц |
Резистор R1 предназначен для автоматического запуска генератора при включении питания. Этот же элемент определяет коэффициент усиления инвертора, и чем больше будет этот коэффициент усиления, тем более прямоугольные колебания будут формироваться на его выходе, а это, в свою очередь, приведёт к снижению тока, потребляемого кварцевым генератором. Выберем номинал резистора R1 равным 1Мом.
Резистор R2 увеличивает импеданс цепи, с тем чтобы вместе с конденсатором C2 увеличить фазовый сдвиг. Это нужно для того, чтобы генератор заработал на нужной, а не на большей частоте. Резистор также изолирует выход инвертора от цепи резонатора и этим сохраняет прямоугольную форму импульса. Номинал резистора должен быть примерно равен импедансу нагрузки Z L , который можно вычислить по приведенной формуле:

Импульсы с частотой f=2,4576 МГц поступают на счетчик ИЕ16, с Q7 выхода счетчика получаем импульсы с частотой f/ 256=9.6 кГц.
4.2 Расчет генератора линейно изменяющегося напряжения
В качестве генератора линейно изменяющегося напряжения выбирается схема на рисунке 5.
Рассматриваемый ГЛИН выполнен на базе интегратора напряжения (DD2, RC- цепь, источник питания U1), управляемого генератором прямоугольных импульсов и источника питания U1. Когда транзистор закрыт, через него протекает неуправляемый (начальный) ток стока. При открытом транзисторе ток через транзистор должен определяться величиной сопротивления нагрузки и напряжением питания.
Когда линейно изменяющееся напряжение Uc(t) на выходе интегратора достигнет значения напряжения срабатывания, происходит подача сигнала управления, под действием которого ключевой транзистор VT1 открывается, разряжая конденсатор. Далее процесс повторяется с периодом:
Задаемся частотой раной 9,6 кГц.
Напряжение Ucm целесообразно выбирать минимальным, чтобы исключить влияние разброса параметров используемых резисторов на коэффициент нелинейности формируемого напряжения.
Максимальное напряжение на конденсаторе связано с длительностью зависимостью
Выбираем U1 = 5В, U2=0В, тогда Ucm = 5В.
Выбираем R 6 = R 5 = 10 кОм,тогда С 3 = 96нФ.
Исходя из следующего, найдем R9.

Uвых = 10 В, тогда:R 9 = Ucmax*R 6 / Uвых = 5*10000/10≈ 2 кОм, берем ближайшее по номиналу
R 9 = R 10 =2 кОм
В качестве ОУ DD3 выбран 140УД7. Питание ±10В.
4.3 Выбор компаратора
В качестве компаратора DD4 используется 521СА3 для обеспечения стабильной работы ШИМ.
Технические характеристики аналогового компаратора 521СА3
 Аналог LM111
Входной ток не более 100 нА
Коэффициент усиления не менее 200000
Ток нагрузки до 50 мА
Питание +5...+30 или ±3...±15 В
Аналог LM111
Входной ток не более 100 нА
Коэффициент усиления не менее 200000
Ток нагрузки до 50 мА
Питание +5...+30 или ±3...±15 В
Области применения
Детекторы пересечения нуля
Детекторы перенапряжений
Широтно-импульсные модуляторы
Прецизионные выпрямители
Аналого-цифровые преобразователи
Резистор R12 в сочетании с диодами D1 и D2 ограничивает размах входного сигнала. Благодаря диодам в ограничиваем размах входного напряжения значениями -12,6 В до +12,6 В, условие состоит в том, что отрицательное входное напряжение не должно достигать значения напряжения пробоя (например, для диода типа КД510А это значение составляет - 50 В).
Таблица 3 Параметры выбранного транзистора
| Наимен. | U обр. ,В | I пр. max, A | I обр. max, мкА | F d max, кГц |
| КД510А | 50 | 0.2 | 5 | 200000 |
4.4 Расчет электронного ключа
В качестве ключа выбирается следующая схема:
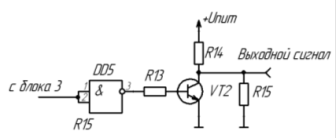
Рисунок 9 – Схема электронного ключа
Rн =0,5 к Ом, Uвых =10В.
Iк=Uвых/Rн=10/500=50mА
По справочнику ищем транзистор, который выдержит заданный ток коллектора (0,05А). Транзистор КТ315А держит постоянный ток до 0,1 А.
Из справочника - h21э, для КТ315А
Считаем базовый ток Iб=Ik/h21э=0.05/30≈ 1,67 mA, на базу надо подводить ток не ниже 167 мкА.
R14 – согласующее сопротивление между компаратором DD3 и транзистором VT2. Выберем R16 = 200 Ом.
R вых =R 15 =500 Ом по заданию, из ряда выбираем 510 Ом. на выходе необходимо получить 10 В, тогда рассчитаем величину резистора R 14
(U пит -U вых)/R 14 =U вых /R 15 ,
откуда R 14 =2R 15 /10=102 Ом, из стандартного ряда выбираем номинал 100 Ом. Рассеиваемая мощность 10В*1.25mA≈0,0125 Вт
Таблица 4. Параметры выбранного транзистора КТ315А
5. Моделирование схемы
Выходной сигнал с генератор треугольных импульсов:
Выходной сигнал с генератора прямоугольных импульсов:
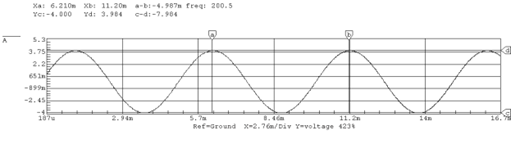
Моделируемый сигнал:
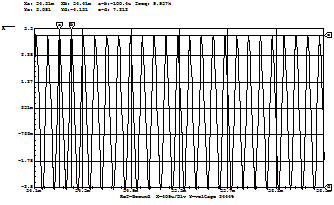
Процесс модуляции:

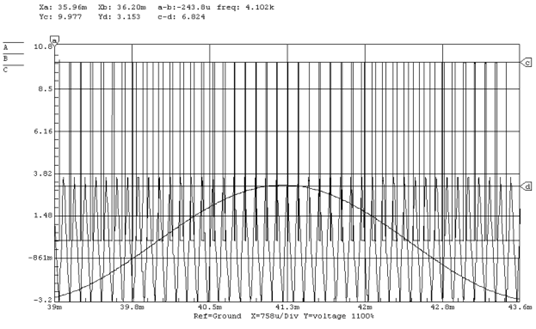
Период выходного сигнала:

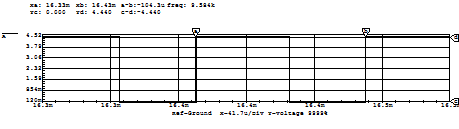
Наименьшая длительность импульса:
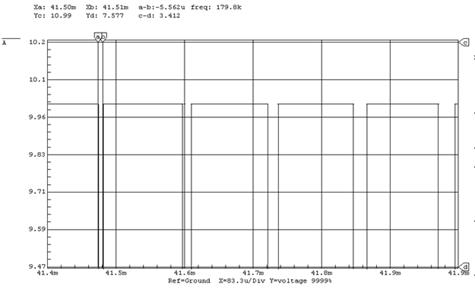
Длительность должна быть равна 5,12 мкс. По графику видно, что она составляет 5,56мкс.
Наибольшая длительность импульса:
Длительность импульса должна составлять 97,37мкс. По графику видно, что она равна 97,74 мкс.
Заключение
В данной курсовой работе разработали принципиальную схему и произвели расчет схемы Широтно-Импульсного модулятора. На вход устройства ШИМ подается синусоида с частотой согласно заданию – 200 Гц, на выходе имеем преобразованный ШИМ сигнал, амплитуда которого 10 В. Диапазон изменения относительной длительности выходных импульсов данного ШИМ составляет – 0.05 ÷ 0.95. Разработанный широтно-импульсный модулятор является достаточно простым. Моделирование схемы производили с помощью пакета CircuitMaker.
Список использованной литературы
1. Альтшуллер Г.Б., Елфимов Н.Н., Шакулин В.Г. Кварцевые резонаторы: справочное пособие. М.:Радио и связь, 1984.-232с., ил.
2. Хорвиц П., Хилл У. Искусство схемотехники: Пер. с англ. – Изд. шестое. М.: Мир, 2001.
3. Лекционный курс по ЭЦиМС (преподаватель Андреев И.Б.).
4. Цифровые КМОП микросхемы, справочник, Партала О.Н. – СПб: Наука и техника, 2001. - 400 стр. с ил.
5. Л. Лабутин, Кварцевые резонаторы. - Радио, 1975, №3.
6. Генераторы прямоугольных импульсов на микросхемах КМОП. В. Стрижов,Схемотехника, 2000, № 2, стр. 28
7. Забродин Ю.С., Промышленная электроника: учебник для вузов. - М.: Высш. Школа, 1982. – 496с., ил.
Вам понадобится
- Arduino;
- светодиод;
- резистор сопротивлением 200 Ом;
- компьютер.
1 Общие сведения о широтно-импульсной модуляции
Цифровые выводы Arduino могут выдавать только два значения: логический 0 (LOW, низкий уровень) и логическую 1 (HIGH, высокий). На то они и цифровые. Но есть у Ардуино «особые» выводы, которые обозначаются PWM . Их иногда обозначают волнистой чертой "~" или обводят кружочками или ещё как-то выделяют среди прочих. PWM расшифровывается как Pulse-width modulation или широтно-импульсная модуляция , ШИМ .
Широтно-импульсно модулированный сигнал - это импульсный сигнал постоянной частоты, но переменной скважности (соотношение длительности импульса и периода его следования). Из-за того, что большинство физических процессов в природе имеют инерцию, то резкие перепады напряжения от 1 к 0 будут сглаживаться, принимая некоторое среднее значение. С помощью задания скважности можно менять среднее напряжение на выходе ШИМ.
Если скважность равняется 100%, то всё время на цифровом выходе Arduino будет напряжение логическая "1" или 5 вольт. Если задать скважность 50%, то половину времени на выходе будет логическая "1", а половину - логический "0", и среднее напряжение будет равняться 2,5 вольтам. Ну и так далее.
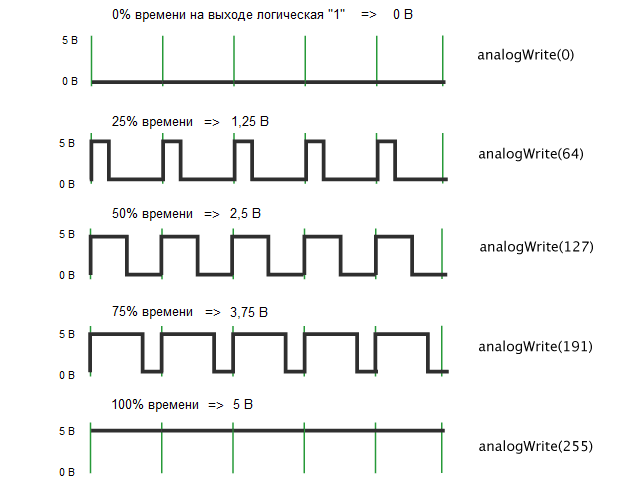
В программе скважность задаётся не в процентах, а числом от 0 до 255. Например, команда analogWrite(10, 64) скажет микроконтроллеру подать на цифровой PWM выход №10 сигнал со скважностью 25%.
Выводы Arduino с функцией широтно-импульсной модуляции работают на частоте около 500 Гц. Значит, период следования импульсов - около 2 миллисекунд, что и отмеряют зелёные вертикальные штрихи на рисунке.
Получается, что мы можем сымитировать аналоговый сигнал на цифровом выходе! Интересно, правда?!Как же мы можем использовать ШИМ? Применений масса! Например, управлять яркостью светодиода, скоростью вращения двигателя, током транзистора, звуком из пьезоизлучателя и т.д.…
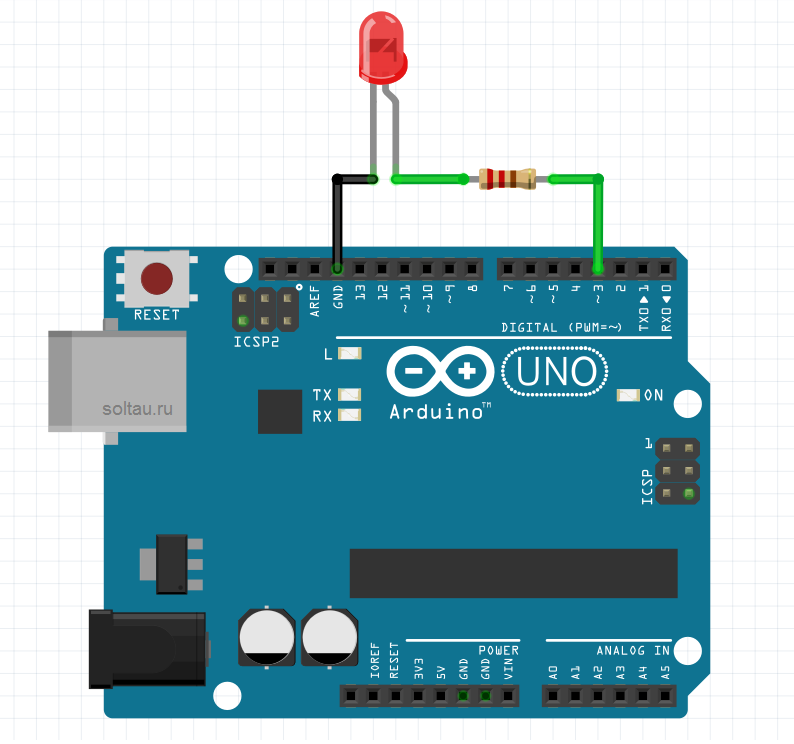
2 Схема для демонстрации широтно-импульсной модуляции в Arduino
Давайте рассмотрим самый базовый пример - управление яркостью светодиода с помощью ШИМ. Соберём классическую схему.
3 Пример скетча с ШИМ
Откроем из примеров скетч "Fade": Файл Образцы 01.Basics Fade .
Немного изменим его и загрузим в память Arduino.
Int ledPin = 3; // объявляем пин, управляющий светодиодом int brightness = 0; // переменная для задания яркости int fadeAmount = 5; // шаг изменения яркости void setup() { pinMode(ledPin, OUTPUT); } void loop() { analogWrite(ledPin, brightness); // устанавливаем яркость brightness на выводе ledPin brightness += fadeAmount; // изменяем значение яркости /* при достижении границ 0 или 255 меняем направление изменения яркости */ if (brightness == 0 || brightness == 255) { fadeAmount = -fadeAmount; // изменяем знак шага } delay(30); // задержка для большей видимости эффекта }
4 Управление яркостью светодиода с помощью PWM и Arduino
Включаем питание. Светодиод плавно наращивает яркость, а затем плавно уменьшает. Мы сымитировали аналоговый сигнал на цифровом выходе с помощью широтно-импульсной модуляции.